


Microwave PIDS are susceptible to reduction in performance and increased system costs due to false alarm rates. False alarms rates in any alarm system reduces the effectiveness of that system and creates additional costs for operators. Therefore reducing false alarm rates of a system while not compromising system performance, is a key factor for PIDS manufacturers. False alarms in microwave PIDS are generally caused by three different categories:
• Weather.
• Foliage.
• Animals.
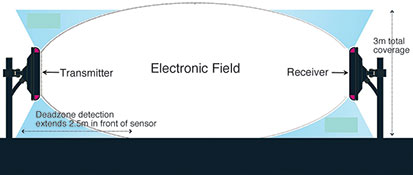
The way these three categories affect the system varies considerably and therefore the three categories must be dealt with separately in order to ensure a false alarm free system. Microwave systems operate on detection of motion. An electronic field is generated between a transmitter and receiver unit as depicted in Figure 1. The electronic field is ‘disturbed’ by motion within the field. If the disturbance is great enough an alarm is generated. The amount of disturbance an object generates in the field is dependent on a number of system attributes such as operating frequency, antenna design and the digital signal processing (DSP) techniques used.
Three attributes of a microwave system affect how an object is ‘viewed’ by the system;
• Operating frequency.
• Design of the antenna.
• Algorithms used to analyse the signal.
Operating frequency
In bistatic radar systems, the transmitter and receiver are at different locations. More particularly, in the case of the angle between transmitter and receiver being equal to 180°, the system may be described as a forward scatter radar.
The strength of the reflected signal from an object is dependent on the scattering properties of the object at the radar operating frequency, i.e. its radar cross section (RCS), which thereby determines how easily the radar system can ‘see’ an object. The transmitted signal is forward scattered away from the transmitter and towards the receiver for analysis.
When the object size is larger than the radar wavelength, optical scattering occurs and the forward scattered RCS is proportional to the frequency squared. Therefore in both cases (small object like a raindrop or large object like a rabbit), a higher operating frequency results in a higher RCS and therefore each object has more effect on the signal and is more difficult to ignore.
In forward scatter radar perimeter intrusion detection systems (PIDS) the traditional radar operating frequency used is 10.5 GHz or 24 GHz, i.e. a radar wavelength of 2.9 cm or 1.2 cm. These systems typically have high false alarm rates, especially during periods of heavy rainfall or due to the movement of foliage within, or small animals through the detection zone of the system. A sterile zone is typically implemented when using these systems to ensure that no foliage is present, and that no small animals enter the detection zone of the system.
For example, a typical raindrop has a radius of approximately 0.05 cm. Therefore the signals forward scattered by rain will be Rayleigh scattered (as the raindrop is less than the wavelength of the system). The electrical size of each raindrop will be 0.25 at 24 GHz and only 0.06 at 5.8 GHz. Therefore the RCS of a raindrop will be a staggering 25 dB greater to a 24 GHz system than a system which operates at 5.8 GHz (10*log((24/5.8)4).
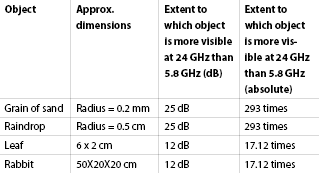
Figure 2 shows the extent to which an object is more visible to a radar system operating at 24 GHz than it is to a Sensurity system.
Operating at a frequency of 5.8 GHz greatly reduces the effect of weather, foliage and small animals on a microwave field due to their visibility being greatly reduced by the lower frequency.
Antenna design
Microwave PID systems typically use a parabolic antenna which creates a narrow beam width of 3.5° in the horizontal and vertical planes, (as parabolic antennas are only capable of producing a symmetrical beam.) Using a planar antenna array, in place of the traditional parabolic antenna allows different beam angles to be applied to the vertical and horizontal axis. An increase in the horizontal plane of an antenna allows an object to be viewed for a longer period of time and thus allows a more informed decision to be made (following the application of powerful DSP techniques) regarding whether the object is a person, vehicle or animal.
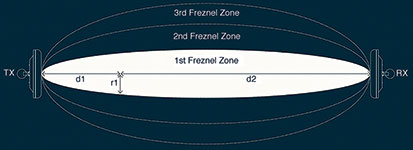
At 24 GHz the Fresnel zones of the bistatic radar link will be twice as tightly spaced as at 5.8 GHz, since the Fresnel zone radius is inversely proportional to the square root of the radar operating frequency. This means that a given object size (for instance a person) will occupy more Fresnel zones simultaneously in a 24 GHz bistatic radar system and hence less signature frequency information will be available for analysis as less changes in the signal will be observable as the object moves through Fresnel zones (Figure 4).
Thus antenna design combined with reducing the operating frequency, allows the system to make more informed intelligent decisions on what type of object created the disturbance in the electronic field of the system.
Digital signal processing
As an intruder moves through the microwave link they forward scatter the microwave energy towards the receiver in slightly different ways depending upon various factors including their position. At some positions the reflected signal from the intruder will actually reinforce the direct signal which propagates from the transmitter to the receiver, resulting in a signal increase at the receiver. At other points the reflected signal from the intruder will cancel the direct signal, resulting in a signal decrease at the receiver. At other points still, the intruder will actually block some portion of the direct signal from reaching the receiver and therefore cause a shadowing effect; again resulting in a signal decrease at the receiver.
The amplitude and frequency components of the signals change based on various factors which include the intruding object’s size (electrical size), position, speed, crossing point along the link and angle of movement (relative to the baseline of the microwave link).
Establishing what patterns (patterns of amplitudes and frequencies) are caused by which events (walking intrusion, crawling intrusion, foliage movement, small animals, parallel motion) is made more trivial due to the lower frequency (5.8 GHz) and with the improved antenna design.
Figure 5 summarises some of the main frequency components caused by various perimeter security events:
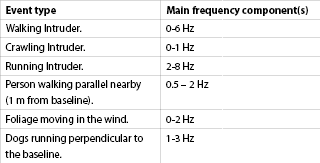
Sensurity has carefully analysed these signals in the time-frequency domain and has uniquely developed intelligent algorithms which alarm on some events but not others; hereby drastically reducing the false alarm rates often associated with microwave PID systems.
Conclusion
In this report we have identified the three categories which are responsible for the majority of false alarms detected in traditional microwave PID systems. This report has discussed alterations to three system attributes that when combined, greatly improve system performance and significantly decrease false alarms.
The outcome of this report is that a microwave PID system operating at a frequency of 5.8 GHz with a planar antenna and using advanced DSP techniques, provides a very attractive solution to reducing false alarm rates in perimeter security applications. For this reason microwave PIDS have the potential to be deployed in many more sites than previously thought suitable in the past; including port applications.
For more information or to find out the benefits of microwave perimeter intrusion detection systems (PIDS), contact George Redpath, Sensurity, info@sensurity.com, www.sensurity.com
This paper research was greatly supported by Maria Heneghan, field applications engineer, Sensurity.


© Technews Publishing (Pty) Ltd. | All Rights Reserved.
 printer friendly version
printer friendly version